

基于CAN总线的红外光幕式机动车外廓尺寸自动测量仪研发
彭玉华1孙朝伟1 成秉军1陈平2
烟台海晨科技有限公司 2. 山东理工大学)
(摘要)针对国内市场上的机动车外廓尺寸自动测量仪存在的问题进行了分析和研究,创新实现了一种基于CAN总线的红外光幕式机动车外廓尺寸测量技术,有效解决了当前产品中普遍存在的动态响应差、测量误差大的问题。机动车外廓尺寸自动测量仪由计算机通过CAN总线采集传感器信息,精确计算出车辆的外廓尺寸。仪器经公安部交通安全产品质量监督检测中心检测,其测试精度达到了国家相应标准要求。
主题词:机动车外廓尺寸自动测量仪CAN总线红外光幕
1 前言
为了有效遏止车辆非法改装,推进车辆超限、超载治理工作,国家标准GB21861—2014《机动车安全技术检验项目和方法》规定,自2017年3月1日起,各个车辆管理所、机动车检测站对新注册和在用重中型货车、专项作业车及挂车的外廓尺寸必须使用机动车外廓尺寸自动测量装置(以下简称外廓仪)进行检测。现在市场上采用激光、CCD、红外光幕测量技术研发的外廓仪较多,由于现有传感器技术的局限,产品普遍存在着动态响应差(检测车速≤5km/h)、测量误差大的问题。激光式外廓仪【4-7】,由于激光雷达采样频率较低(50Hz),车辆表面脱漆粗糙及深颜色对激光反射率影响较大,测量误差<±2.9%±35mm【15】;CCD式外廓仪【8-11】,由于CCD摄像机易受外界光的干扰,在理想检测条件下测量精度只能在±1%左右【14】;光幕式外廓仪【12-14】,由于现有光幕传感器的数据通讯接口均为RS232或485,数据采集及传输速率<50Hz,当检测车速超过5km/h时测量误差较大。
针对上述问题,我们研发了一种基于CAN总线的红外光幕式外廓仪,创新的将实时性强、抗电磁干扰能力强的CAN总线技术应用于外廓仪系统之中,大大提高了系统的总体性能,使数据采集及传输速率达到100Hz,动态响应也提高到≤7km/h。仪器除自动测量车辆的长宽高尺寸外,还具有测量轴距、半挂车销轴距、栏板高度等功能,尤其是检测半挂车时,车辆一次通过就能够检测出牵引车的长宽高尺寸及轴距、挂车的长宽高尺寸及轴距,同时还能测出半挂车牵引销中心轴线与非转向轴组水平几何中心线的水平距离(即半挂车销轴距)。经检测,仪器的测量误差<±0.7%,达到国家标准GB21861—2014【1】及公共安全行业标准GA/T-1402-2017【2】规定的±1%或±20mm误差要求。下面详细介绍基于CAN总线的红外光幕式外廓仪。
2 外廓仪的工作原理
2.1 工作原理
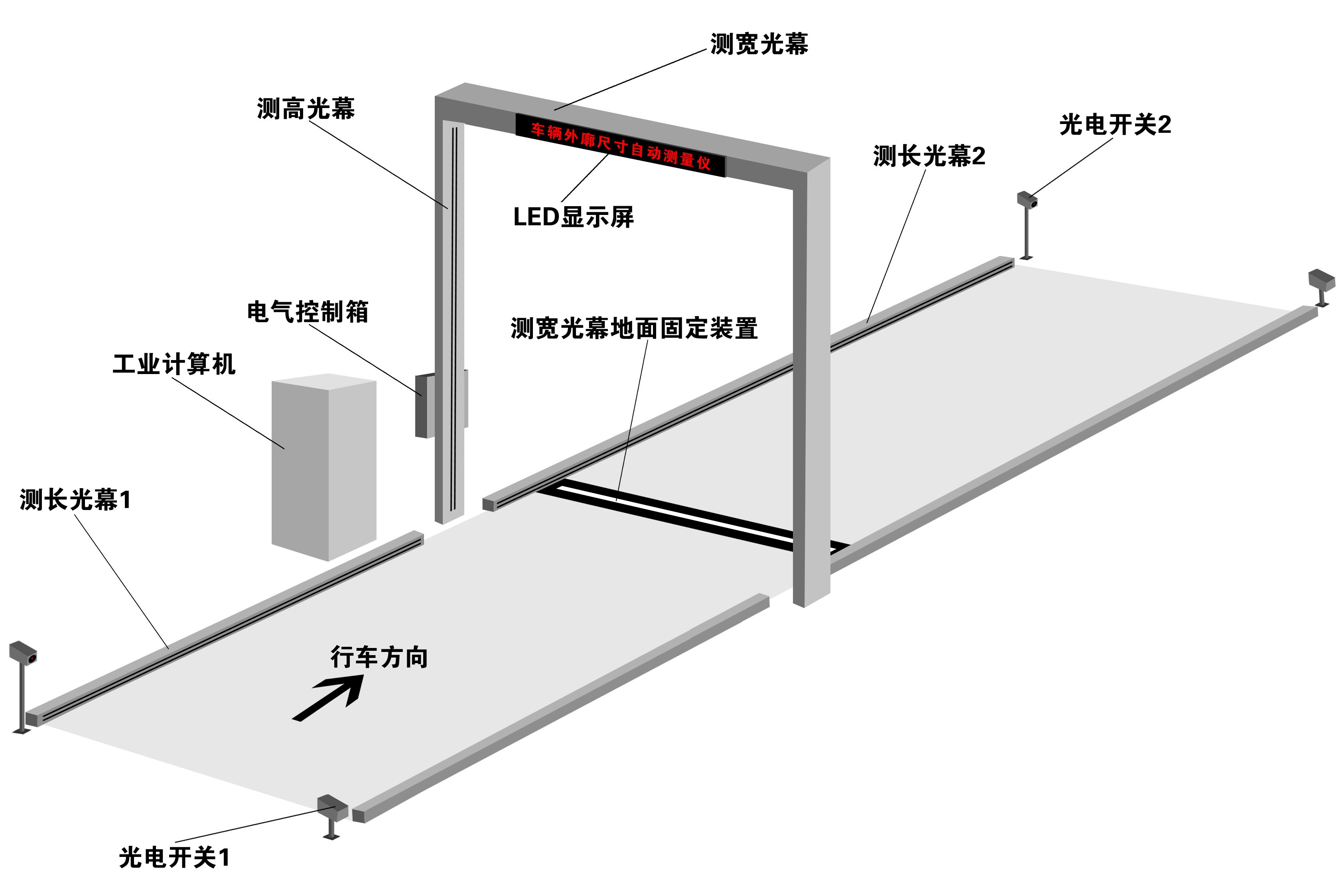
外廓仪的系统构成见图1,计算机通过CAN总线与测长、测宽、测高光幕传感器连接,当被测车辆驶入测量区域时,触发光电开关1,检测开始,车辆以5~7km/h速度通过测量区域,此时由下位机对所有光幕传感器的每一个光轴进行高速扫描(扫描频率100Hz以上),并实时采集、存储光轴被车辆遮挡的信息和数据,通过CAN总线实时传送给上位机,当被测车辆离开测量区域时,触发光电开关2,结束数据采集及传输,由上位机自动计算出车辆外廓尺寸。
图1 系统结构示意图
2.2测量方法
2.2.1长度测量
如图2、图3所示,测长光幕1、2对称安装在龙门支架的两侧,离地面高度约10cm左右,与车辆行驶方向平行,光幕的每一个光轴与龙门支架上的测高光幕的光轴中心线有一个固定的坐标位置尺寸,当被测车辆头部刚刚遮挡到测高光幕时,计算机根据车辆最前轮在测长光幕中的所在位置,计算出车辆的前悬尺寸B,在车辆的行驶过程中计算出车辆的轴距尺寸A1、A2,当被测车辆尾部刚刚离开测高光幕时,计算机根据车辆最后轮在测长光幕中的所在位置,计算出车辆的后悬尺寸C,车辆长度尺寸D=B+A1+A2+C。测长示意图:
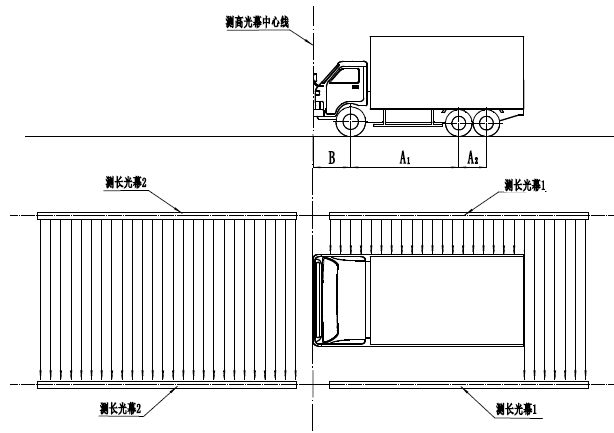
图2长度测量1(车辆前悬、轴距测量)
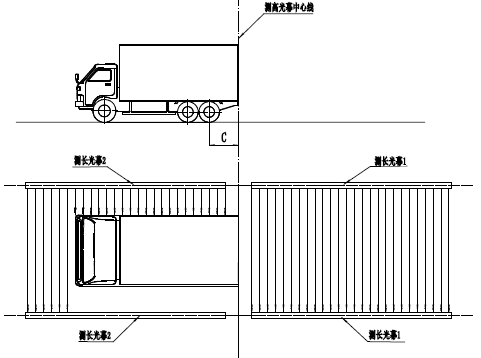
图3长度测量2(车辆后悬测量)
2.2.2宽度测量
如图4所示,测宽光幕发射单元安装在龙门支架上,接收单元嵌入在地面钢制固定装置中,光幕的每一个光轴与龙门支架中心线有一个固定的坐标位置尺寸,计算机根据车辆遮挡状态信息,计算出车辆的宽度尺寸。

图4车辆宽度测量
2.2.3高度测量
如图5所示,测高光幕分别安装在龙门支架两侧,光幕的每一个光轴与地面有一个固定的坐标位置尺寸,计算机根据车辆遮挡状态信息,计算出车辆的高度尺寸。
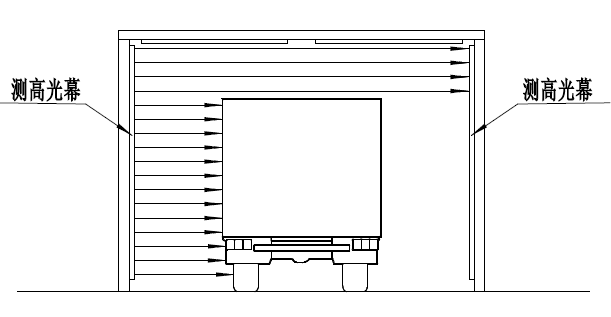
图5 车辆高度测量
3 系统硬件
系统以工业计算机为核心,由多下位机对测长光幕传感器(1、2)、测宽光幕传感器、测高光幕传感器的光轴遮挡状态进行实时扫描检测,将采集到的信息和数据通过CAN总线传送给上位机,然后由上位机完成对被测车辆外廓尺寸的自动测量。系统其它外部设备包括LED显示屏、激光打印机、摄像机、CAN集线器、光电开关等。硬件系统框图如图6
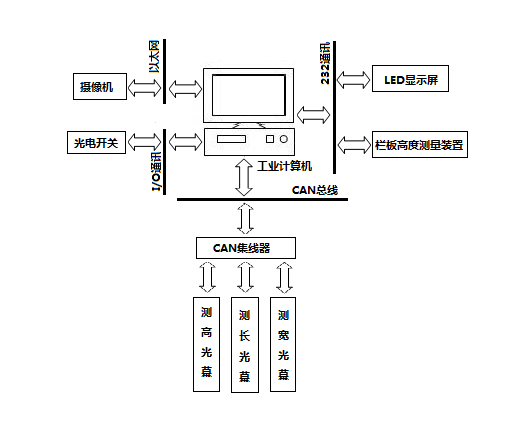
图6 硬件系统框图
4 系统软件
系统软件分为两大部分,分别为光幕传感器中的下位机程序和工业计算机中的上位机程序。下位机软件主要作用是实时扫描光幕传感器各光轴的状态信息,并通过CAN总线发送到上位机。上位机软件的主要作用和功能是接收下位机传送的数据并进行缓存,分析、处理并计算出车辆的外廓尺寸。软件还具有登录存储车辆信息、打印报表以及检测结果上传等其它辅助功能。
系统软件采用模块化设计,主要模块为长度计算模块(包括前悬、后悬及轴距计算)、宽度计算模块、高度计算模块、半挂车分离模块、牵引车分离模块、过滤模块(根据GB1589-2016【3】要求滤除不计入外廓尺寸的车辆部件)等。系统软件流程图如下:
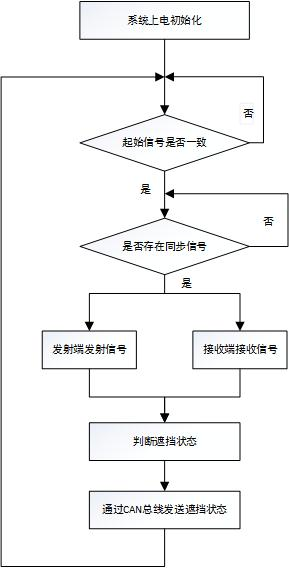
图7下位机软件流程图
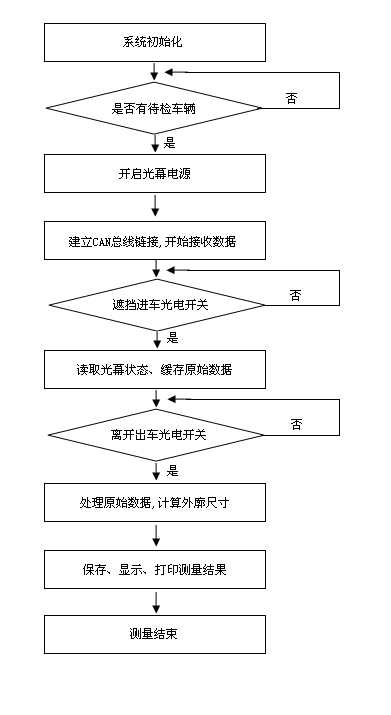
图8上位机软件流程图
5 系统测试
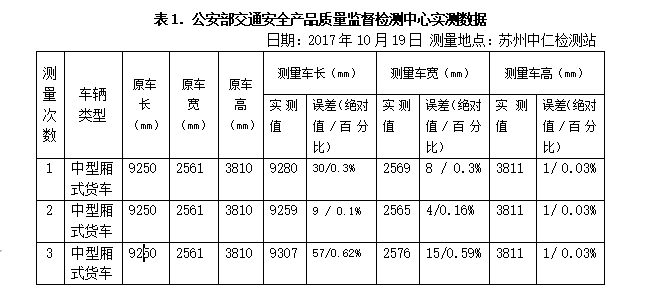
基于本文原理设计、研发的外廓仪,工作温度为-35℃~60℃,能够满足我国北方极寒及南方高温条件下的工作环境要求,适合室内或半室外安装使用。自2017年3月1日起,仪器已在国内数百家的机动车安全(综合)性能检测站、交警车辆管理所机动车查验系统、二手车交易查验系统、汽车制造厂整车出厂检测线等部门广泛应用,取得了较好的使用效果。2017年7月1日,公共安全行业标准GA/T-1402-2017《机动车外廓尺寸自动测量装置》实施后,按照新标准的要求,该仪器率先通过公安部交通安全产品质量监督检验中心的检测,最大测量误差:测长0.62%,测宽0.59%,测高0.03%,实测数据见表1。
表1.公安部交通安全产品质量监督检测中心实测数据
日期:2017年10月19日测量地点:苏州中仁检测站
6 结束语
本文提出一种基于CAN总线的红外光幕式机动车外廓尺寸自动测量技术,解决了目前国内外廓仪普遍存在的动态响应差、测量误差大的问题,减少了用户因为仪器测量不准导致的人工复测修正工作【15】,实现对车辆外廓尺寸快速、精确的自动测量。另外,仪器还具有占用场地小、性价比高、维护成本低等特点,有着非常广阔的应用前景。
参考文献
1GB21861—2014《机动车安全技术检验项目和方法》
2GA/T-1402-2017,《机动车外廓尺寸自动测量装置》
3GB1589-2016,道路车辆外廓尺寸、轴荷及质量限值
4王振华,许琳娜,苏现征.基于激光扫描技术的车辆外廓尺寸动态测量系统的设计.电子设计工程, 2017, 25 (14) :131-135
5蒋云清,廖小鹏.激光与三维图像处理技术在机动车外廓尺寸动态测量中的应用.客车技术与研究 , 2014 (3) :42-45
6朱英龙.车辆轮廓尺寸测量系统研究.长安大学学报,2016
7李源波,宫清华.车辆外廓尺寸动态测量装置的设计与实现.电子技术与软件工程 , 2016 (20) :243-244
8蔡文,吴黎明,陈嘉源,李福坚,杨耀光.机器视觉在车辆外廓尺寸检测中的技术研究.电视技术 ,2015 , 39 (7) :104-107
9翟乃斌.基于计算机视觉的汽车整车尺寸测量系统的研究.吉林大学学报, 2007, 24 (3) :22-26
10梁春疆,段发阶,杨毅,李 洋,许 飞.车辆外廓尺寸计算机视觉动态测量.光电工程,2016(1):42-48
11程磊.车辆轮廓自动测量系统的研究与设计.山东理工大学学报, 2016
12王兴宇,苏建,张立斌.车辆三维轮廓的光栅投影测量技术研究.公路交通科技 , 2009 , 26 (6) :123-128
13阮展逸.汽车外廓尺寸红外光幕全自动测量方法研究.计量与测试技术,2017(44):100-102
14黄和跃.如何正确选用车辆外廓尺寸测量仪.中国新技术新产品, 2015 (15) :36-37
15辆外廓尺寸自动测量仪不合格率较高的原因.中国计量,2018(1):110-111
烟台海晨智能设备有限公司
地址:山东省龙口市黄城通海路北首
电话:0535-8525840 ,8528358
手机:18663858986微信同号
传真:0535-8525840
网站:http://www.ythczn.com
Email:ythckjyxgs@163.com
 网站首页
网站首页 电话咨询
电话咨询 返回顶部
返回顶部